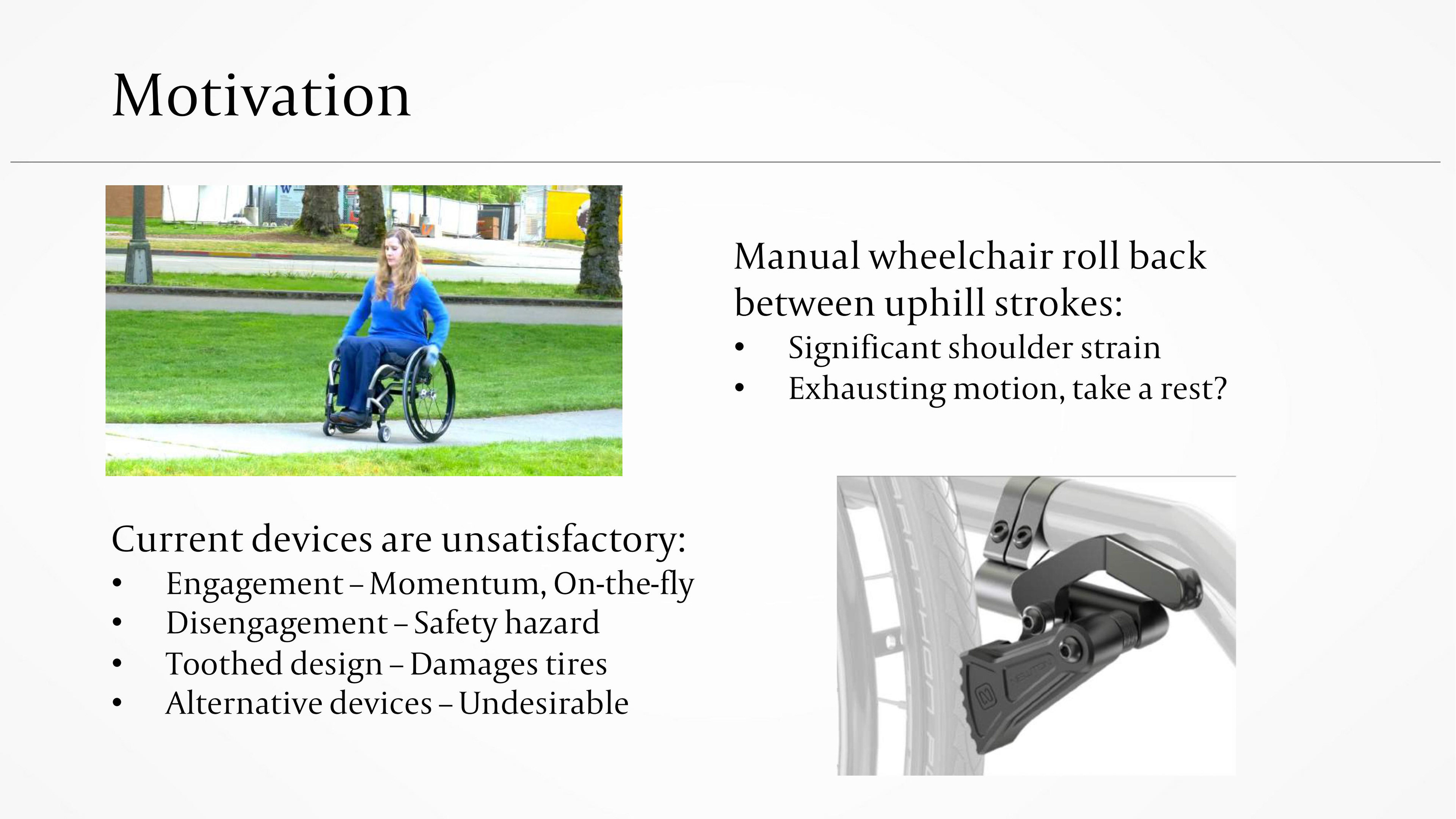
Going uphill is difficult for manual wheelchair users. The user must rapidly make short strokes to propel themselves uphill without allowing the wheelchair to roll backwards. This is exhausting and puts significant strain on wheelchair users' shoulders.
Stopping on hills with traditional grade aids can be dangerous. Traditional grade aids do not automatically disengage, so leaning back to relax can be disastrous.
Disadvantages of the traditional grade aid:
- Sharp teeth can destroy wheelchair tires
- Users can forget to engage and disengage the device.
- Device poses a tipping hazard.
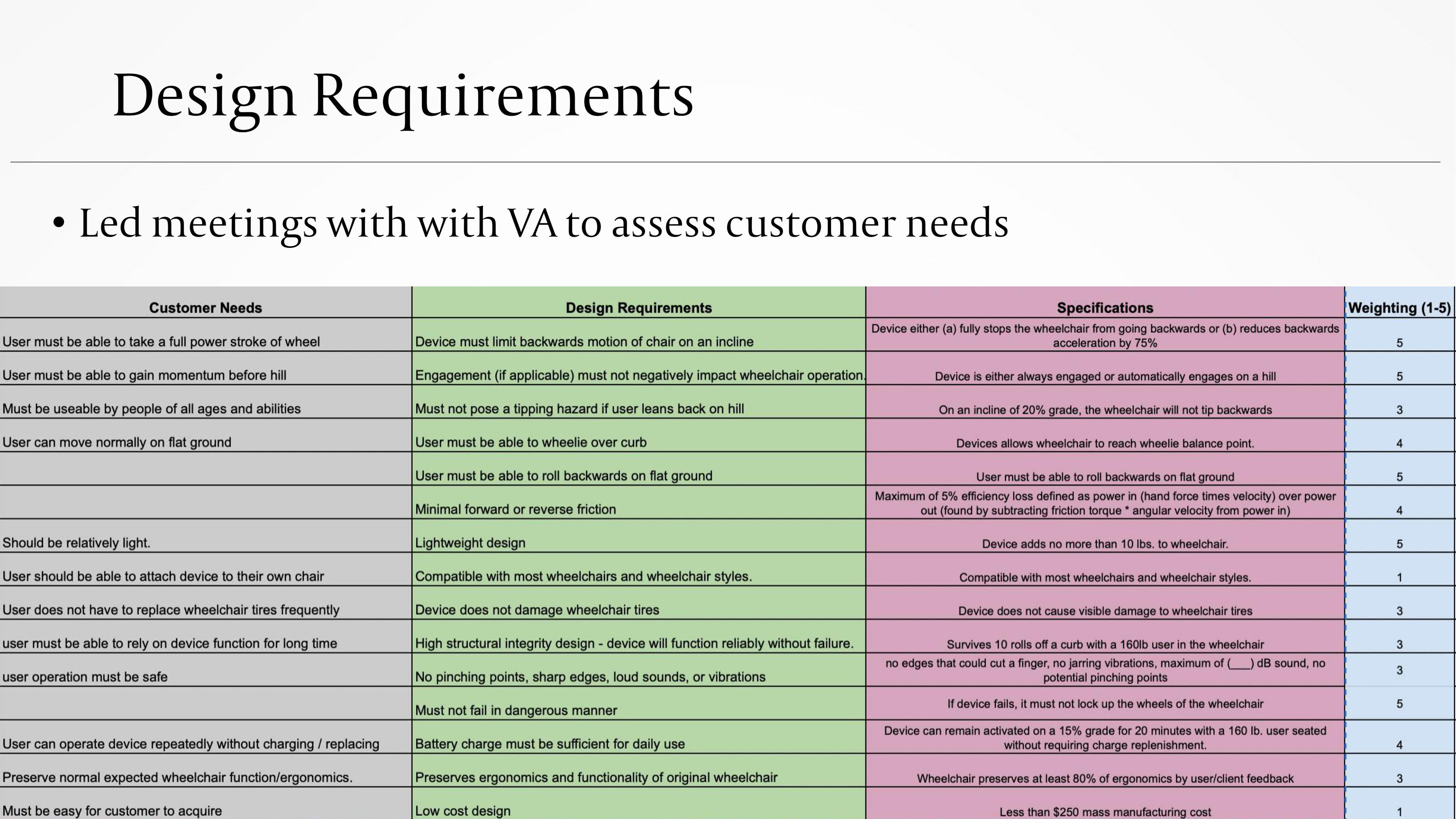
We set out to design a grade aid which would fulfill the following key requirements:
- Limits backwards motion on an incline
- Automatically engages and disengages, includes a safety override
- Allows the user to perform a wheelie
- Allows the chair to roll backwards on flat ground
- Lightweight
- Does not damage wheelchair tires
- If battery powered has sufficient charge for extended use
Slides Outlining the Project and My Individual Contributions:
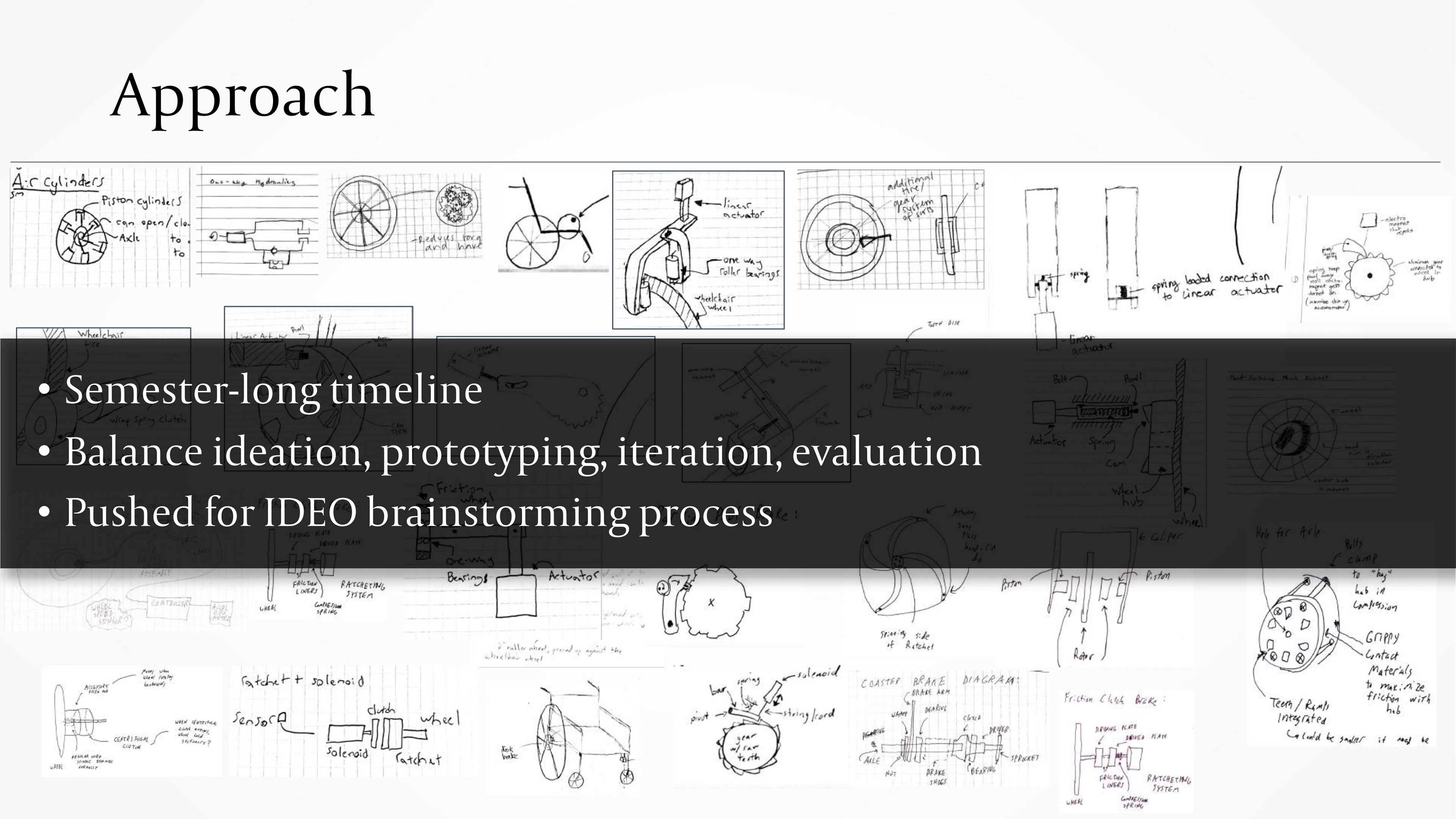

Iterative Design Process
First CAD mockup
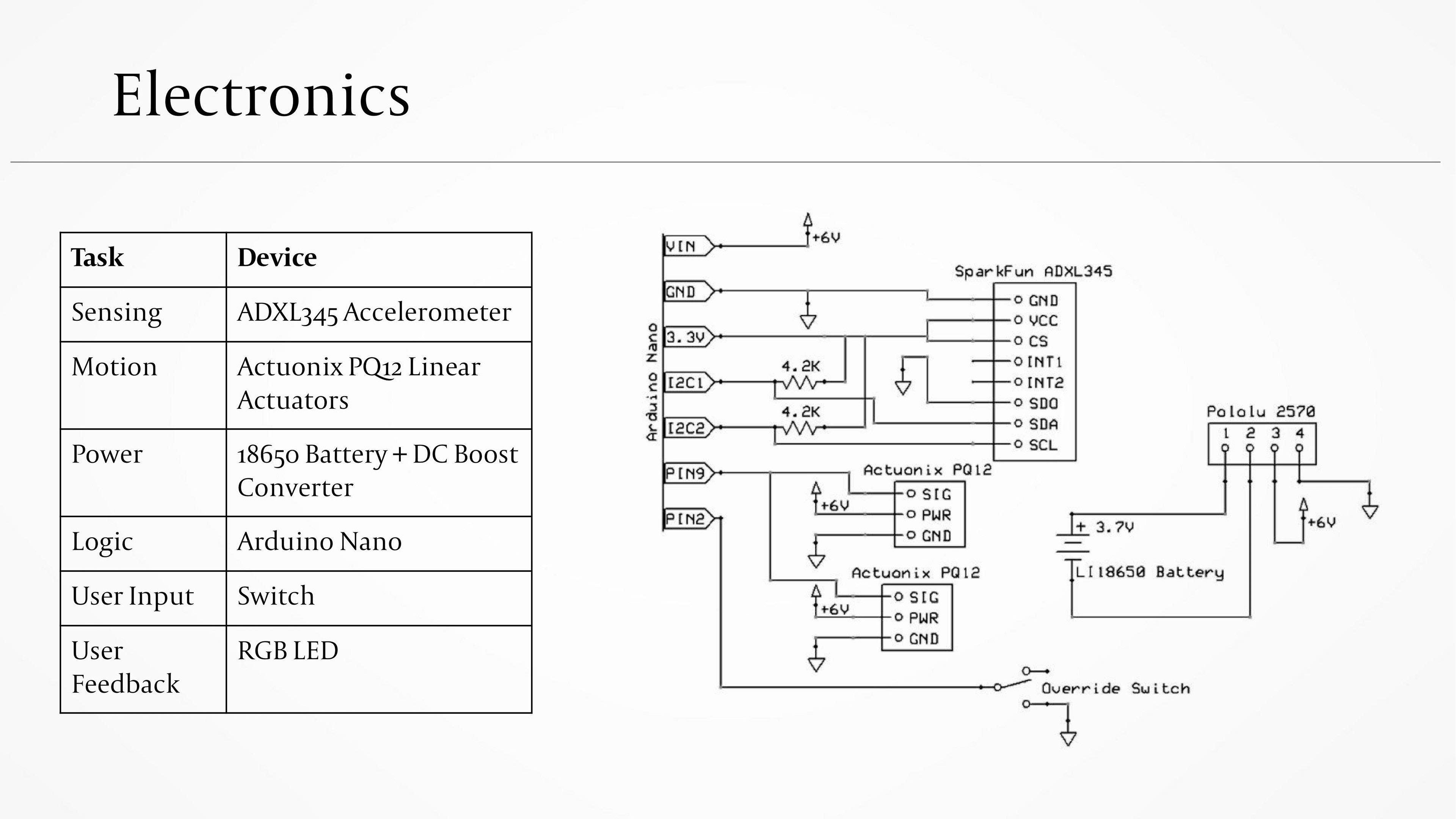
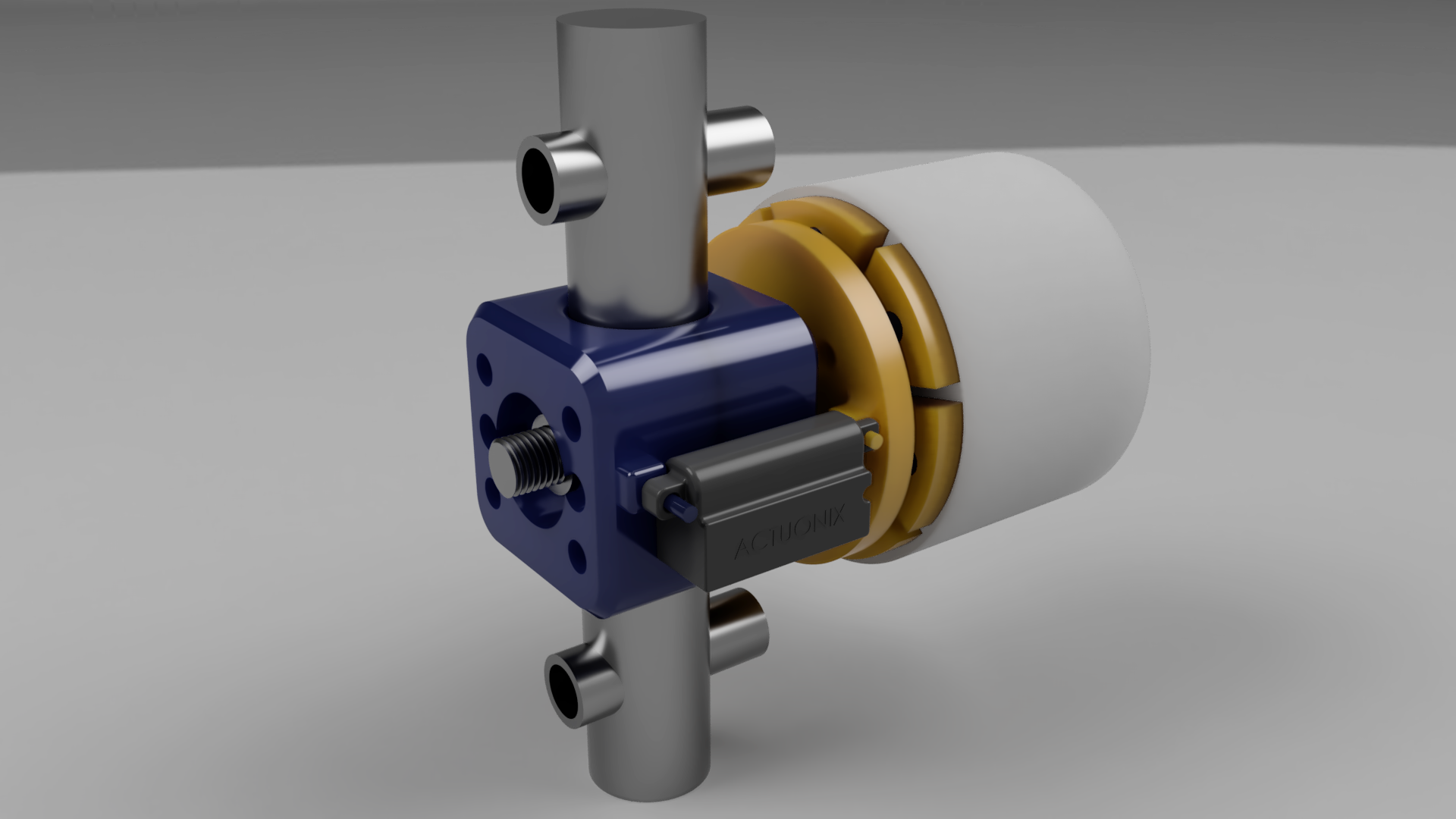
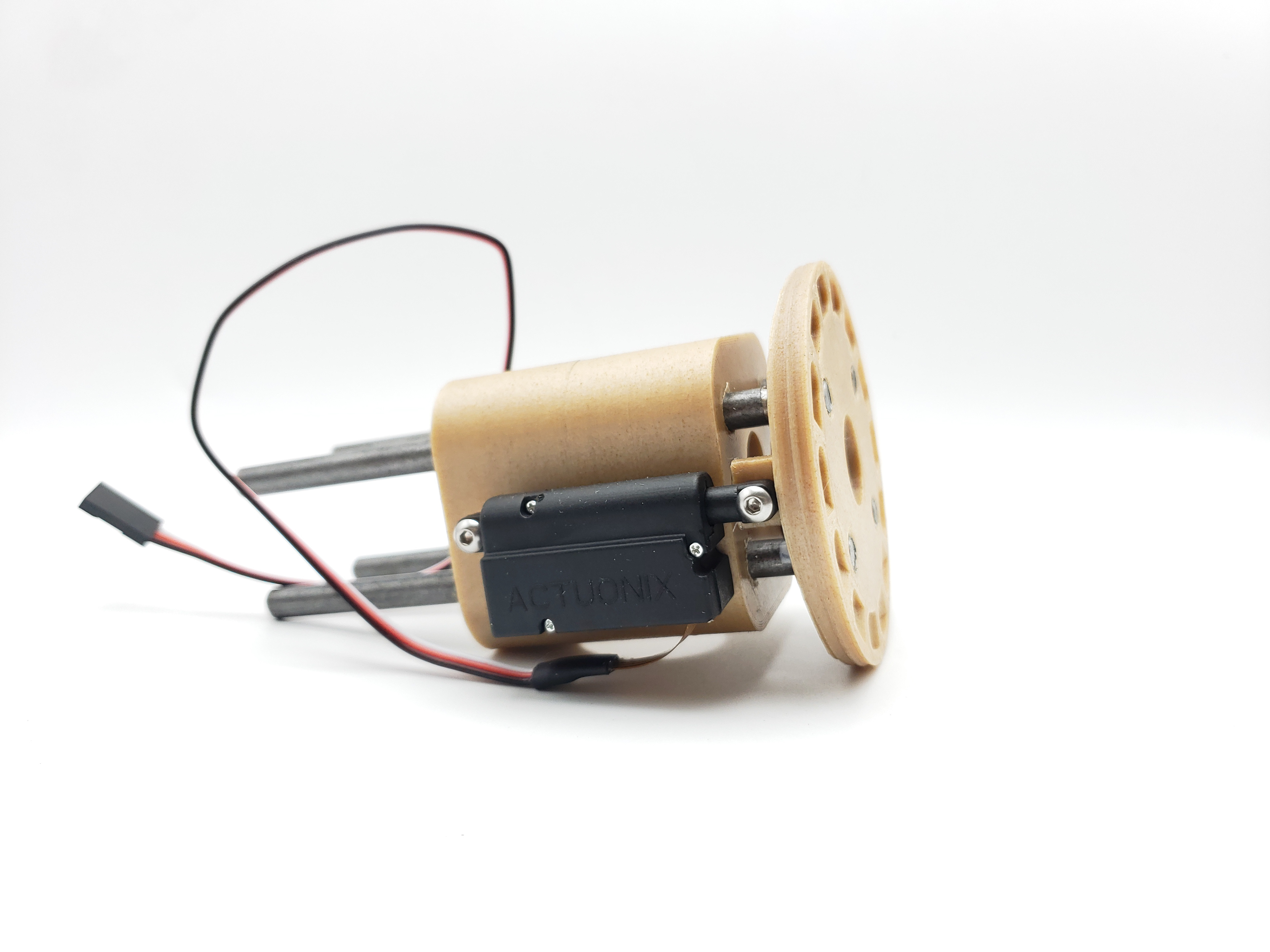
Actuator implementation
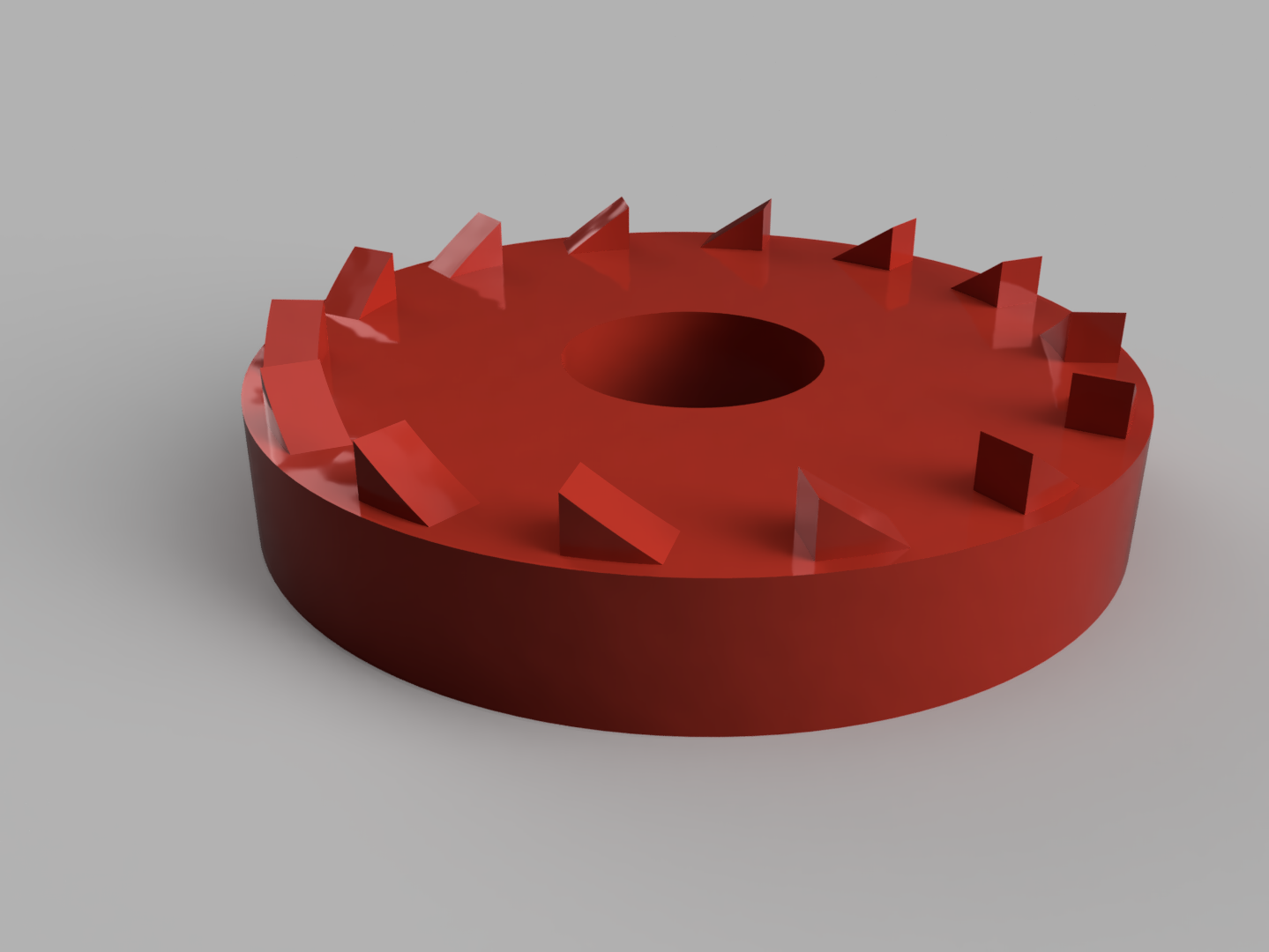
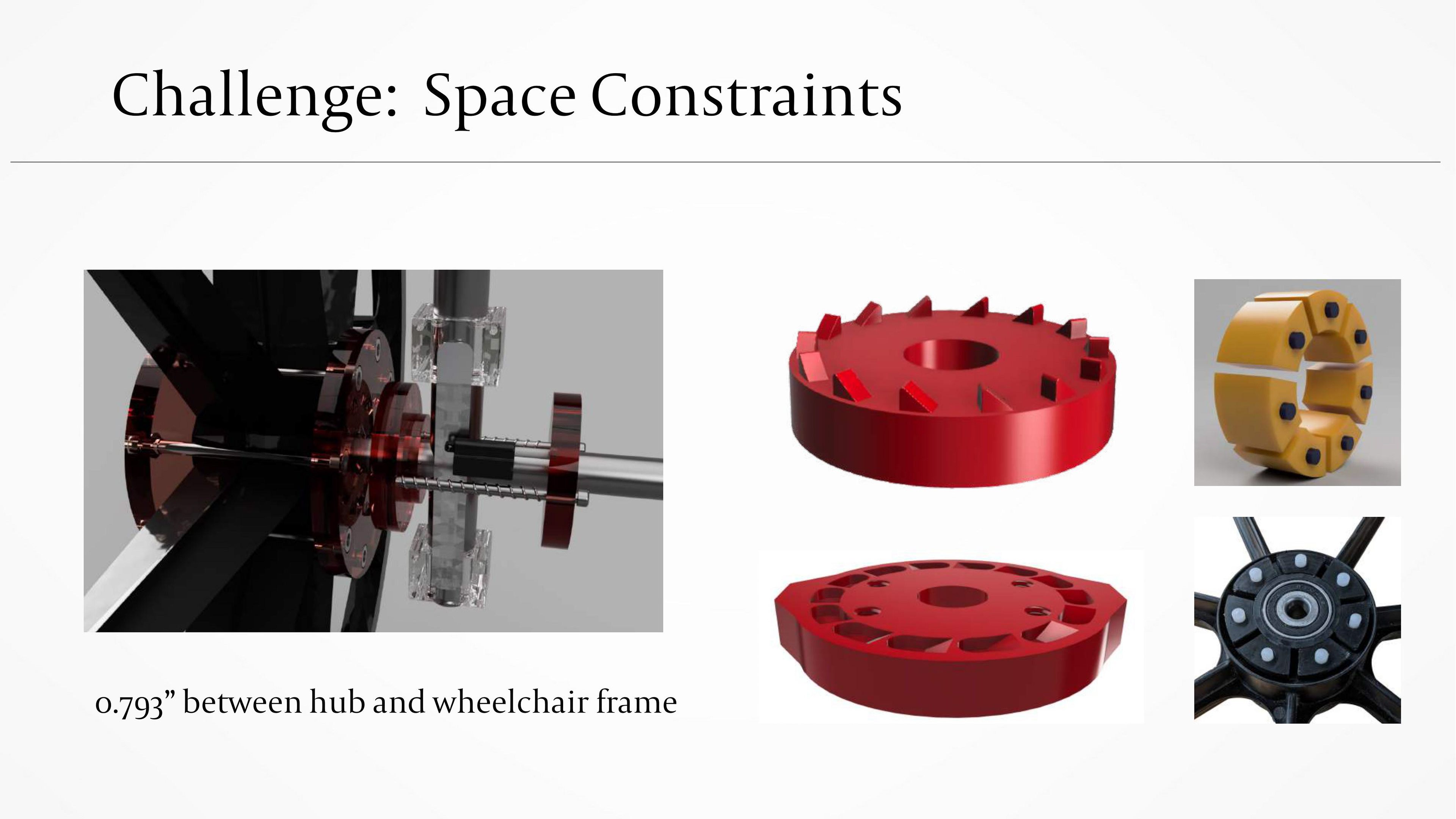
Tooth disc
CAD model used for first prototype
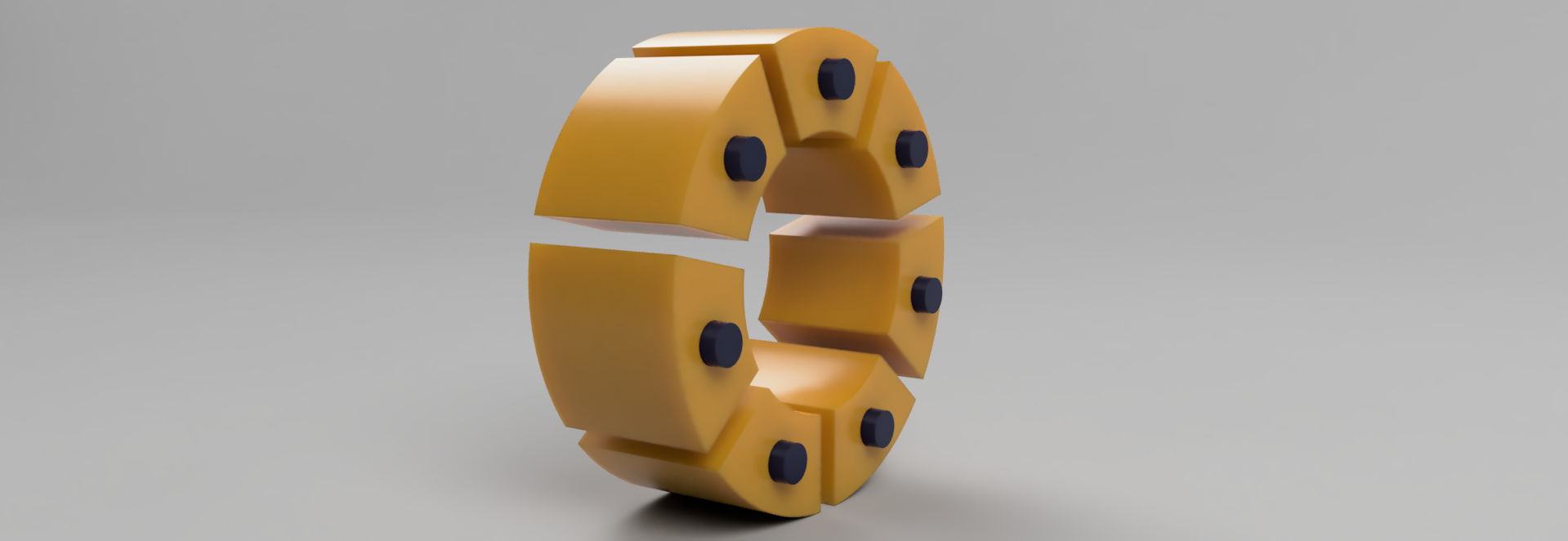
Hub inserts
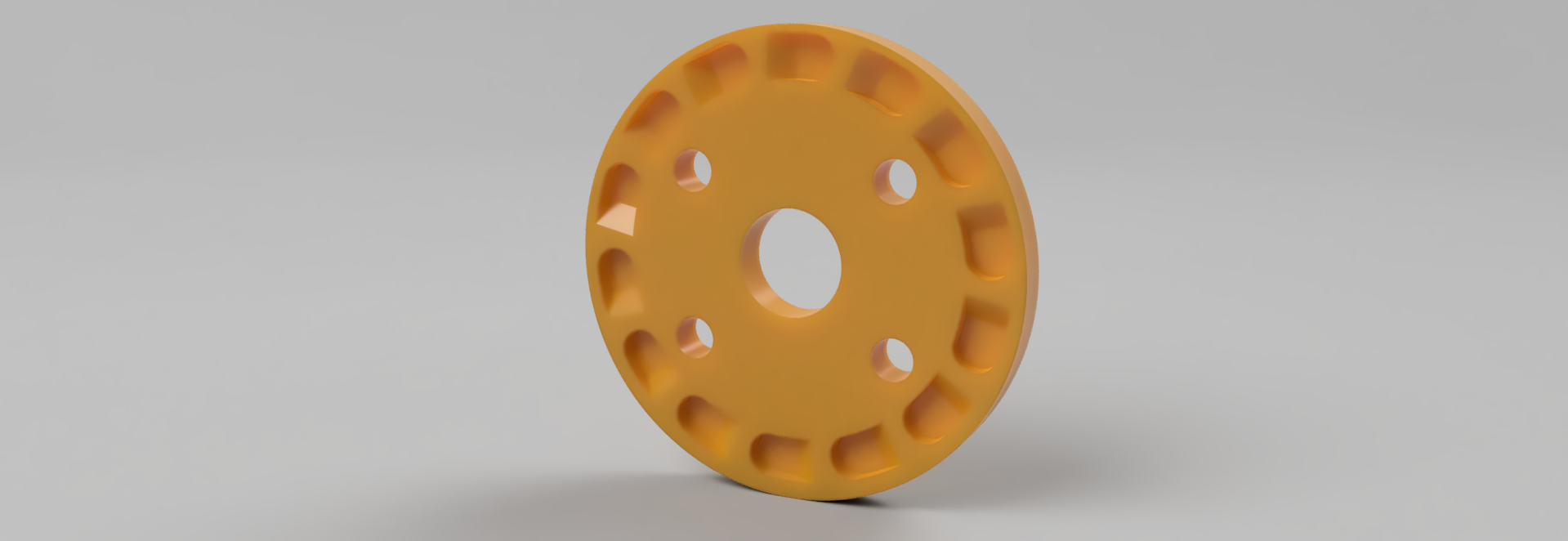
Inset tooth disc to save space

Huh insert profile

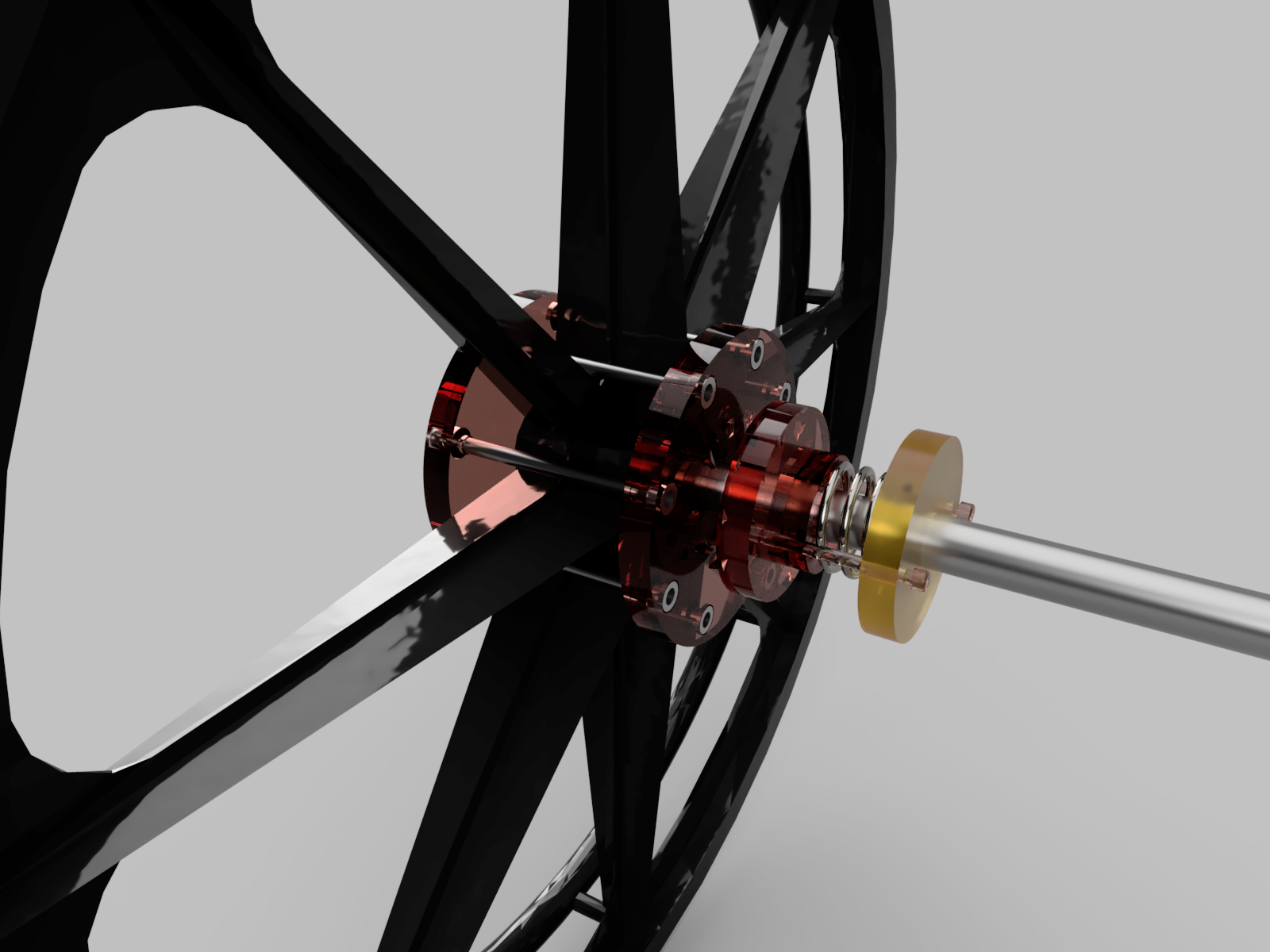
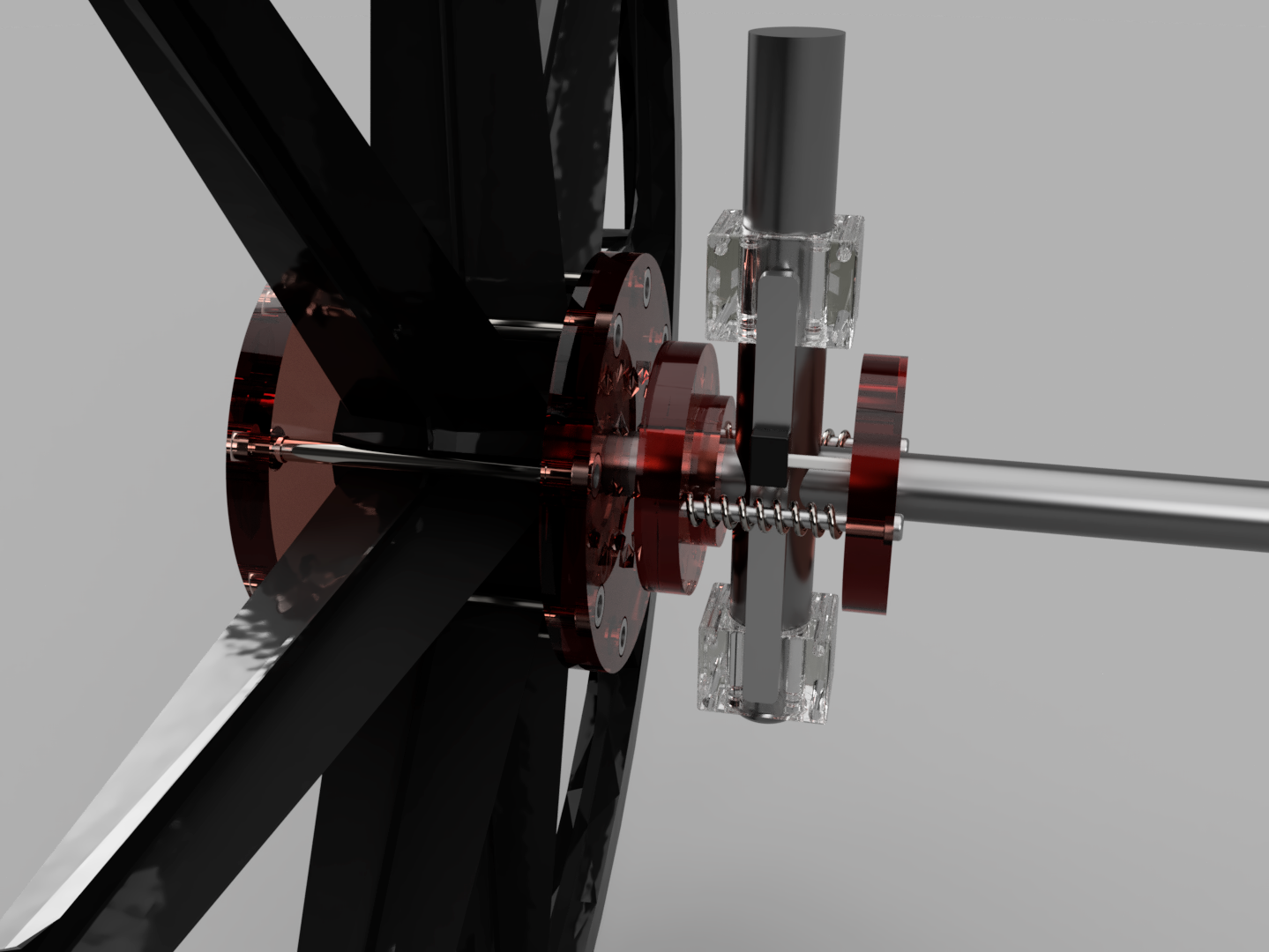
Closeup of actuator-disc interface
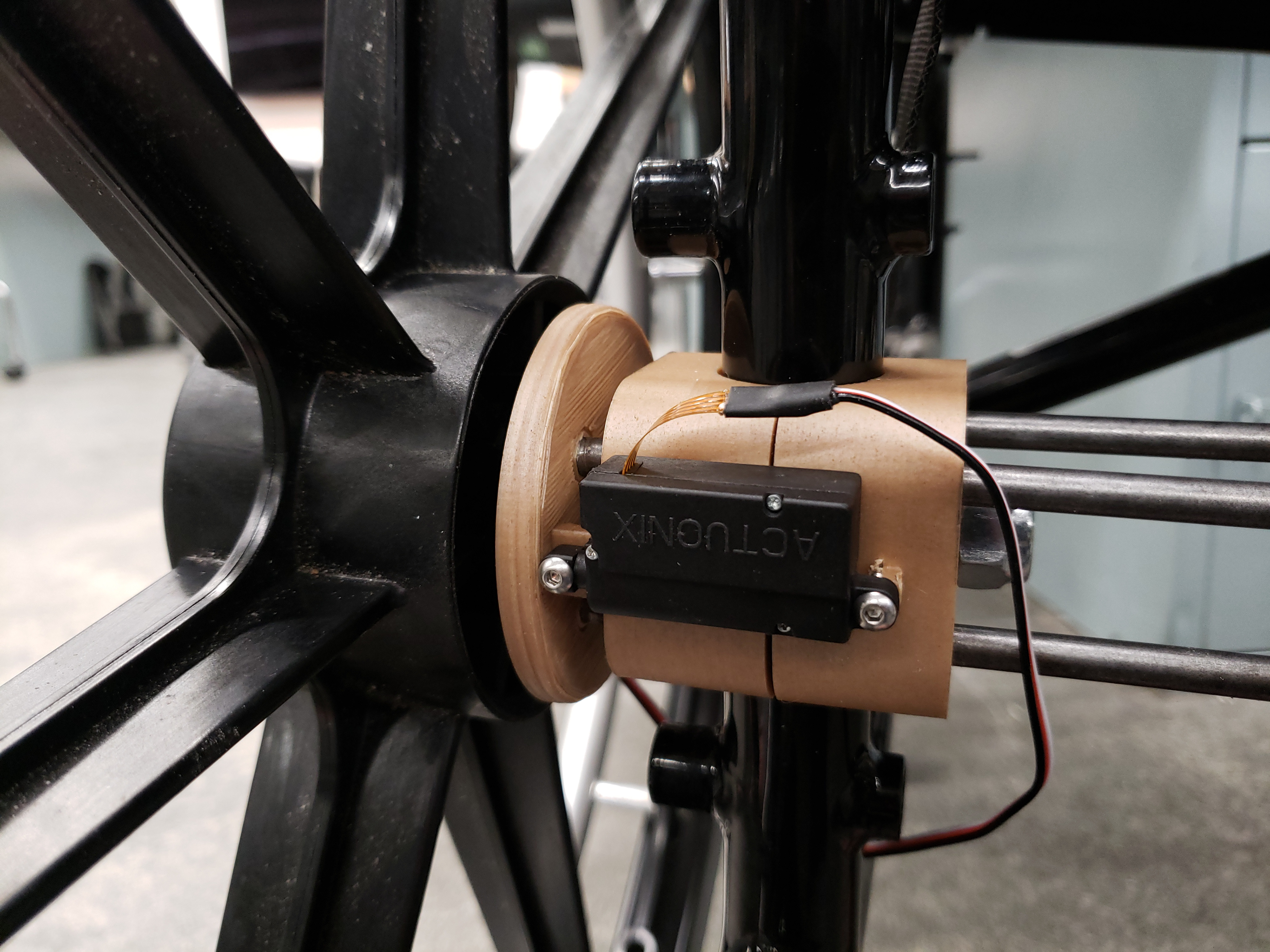
First prototype on the chair
First prototype closeup

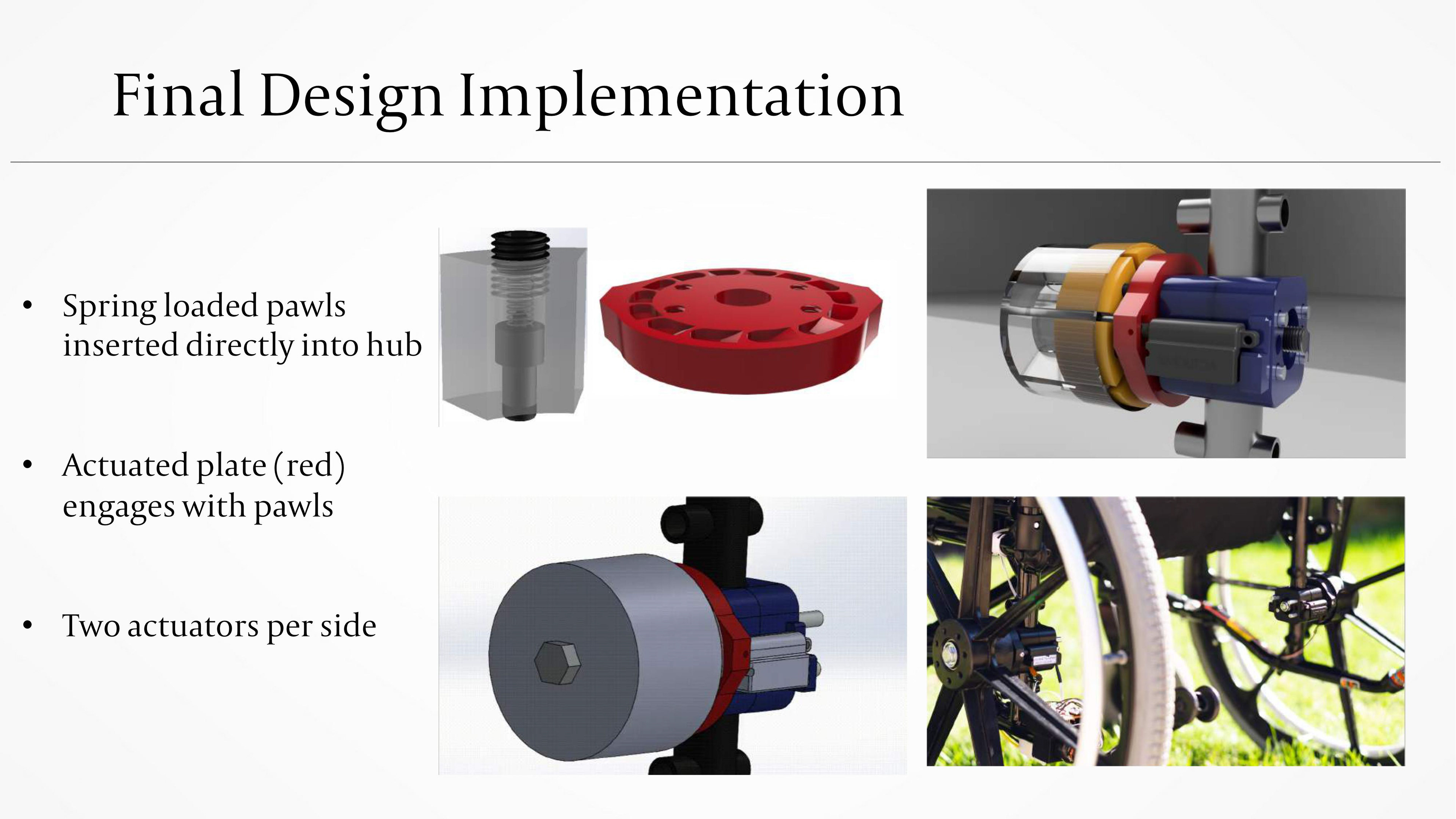
Final CAD model (colored for visibility)
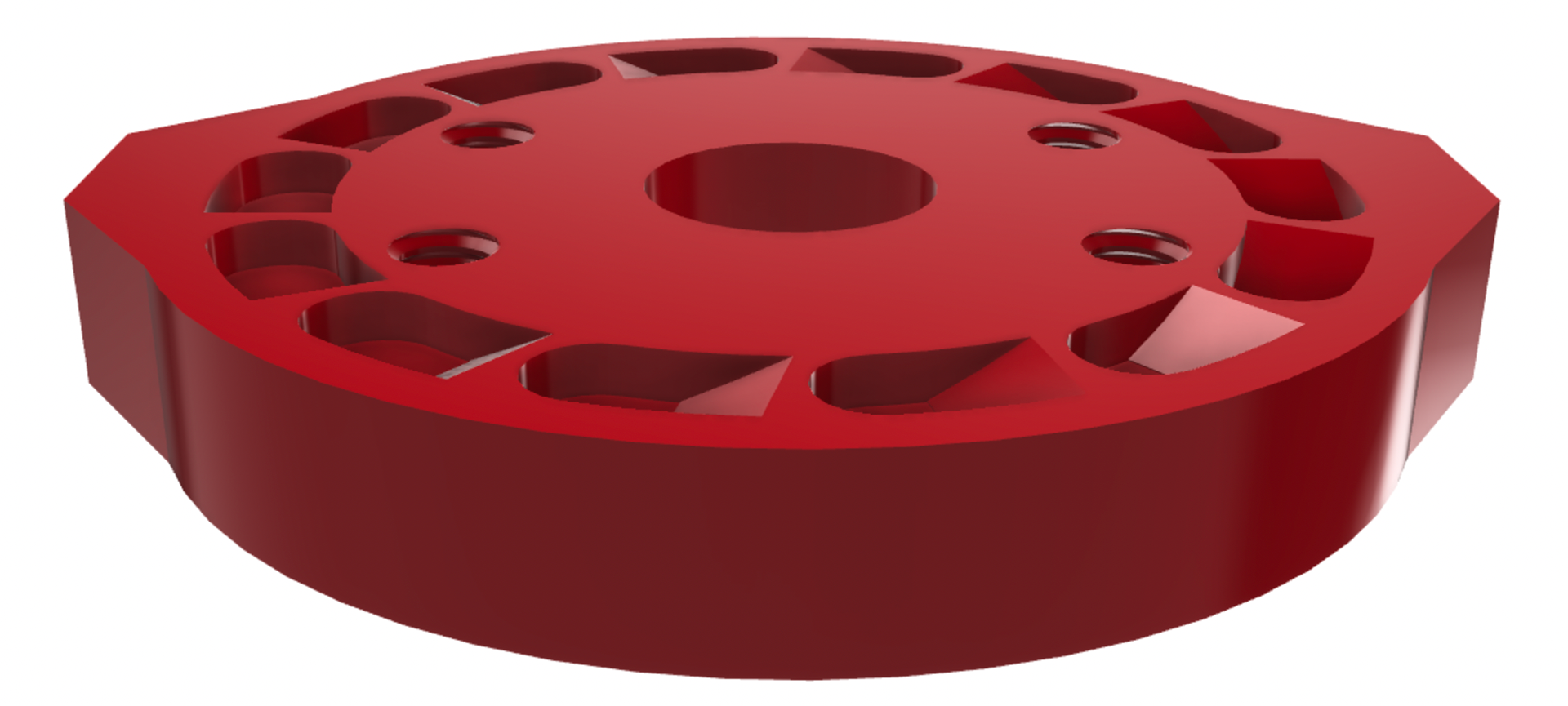
Dual actuator inset tooth disc with threaded guide rod holes

Closeup of hub and hub inserts

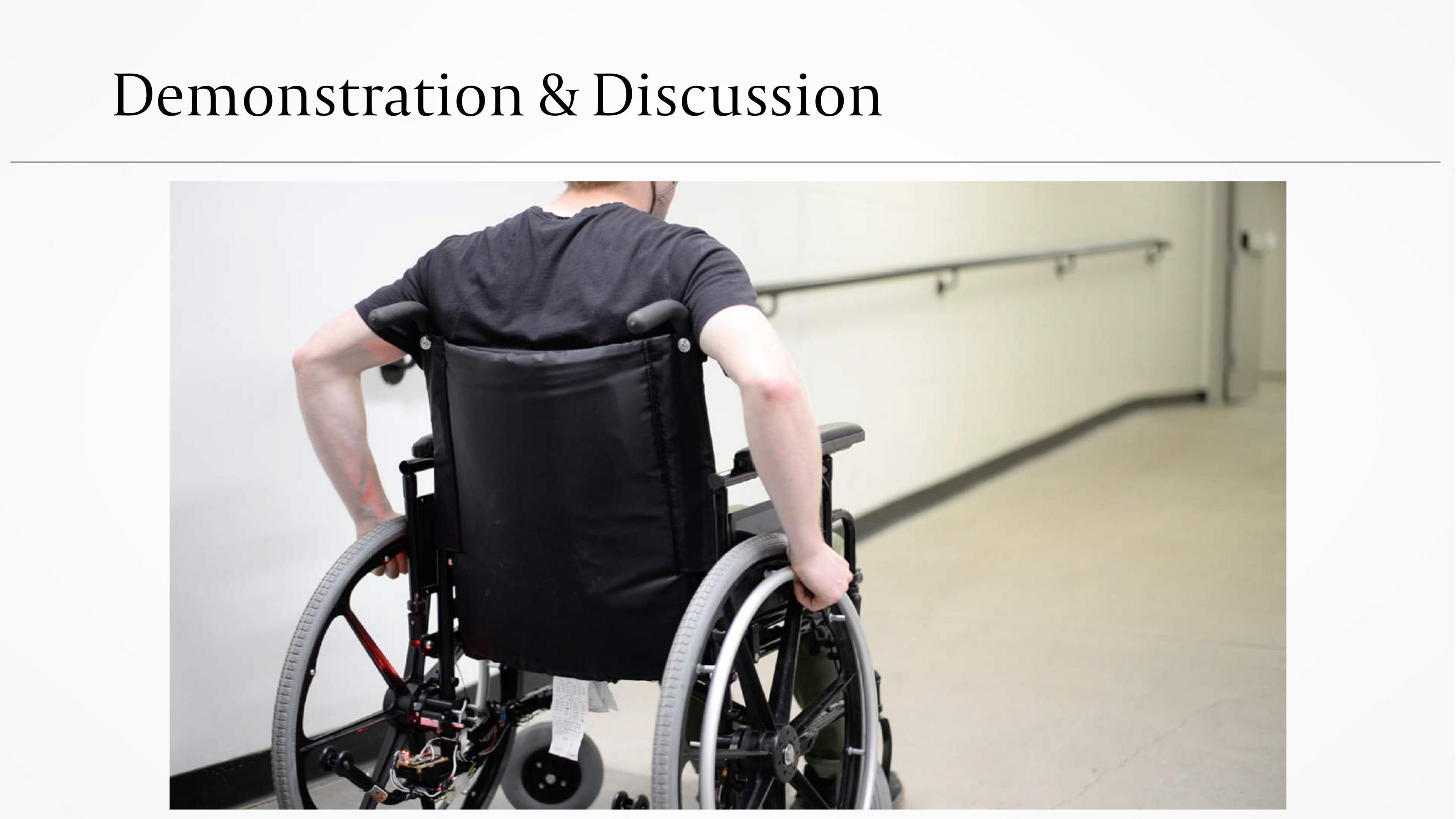
Final design on the chair

Final design mounted on the wheelchair.
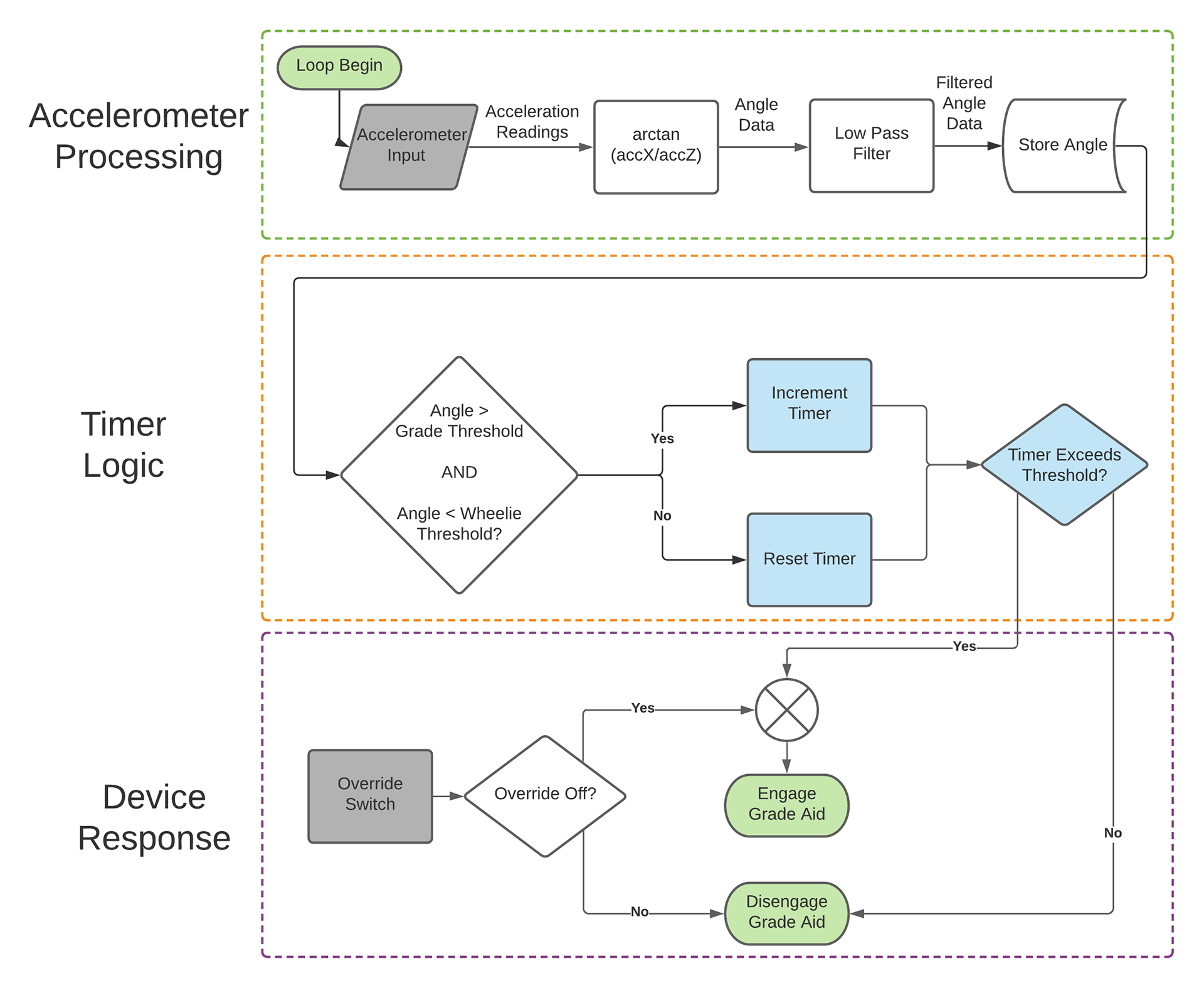
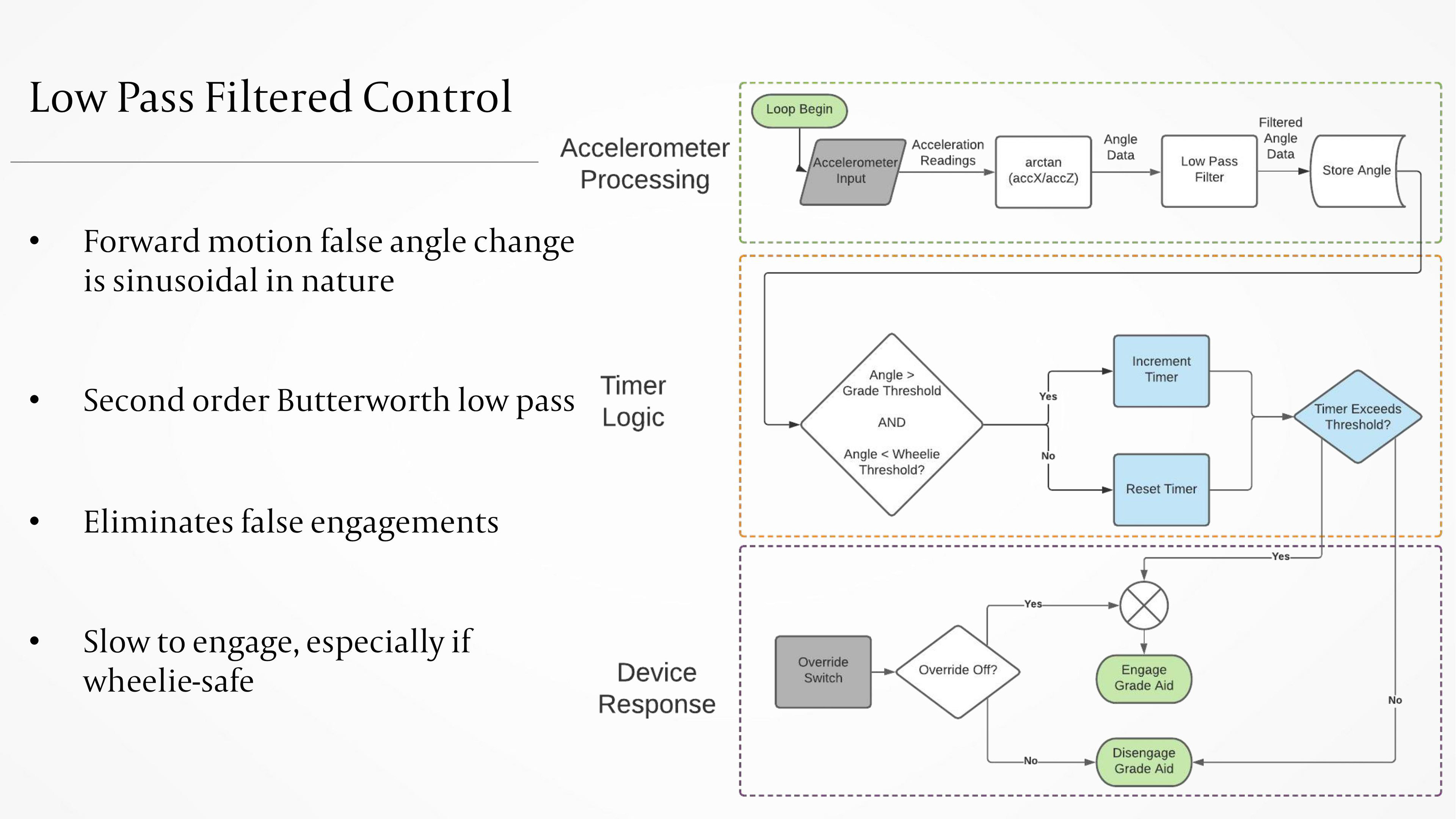
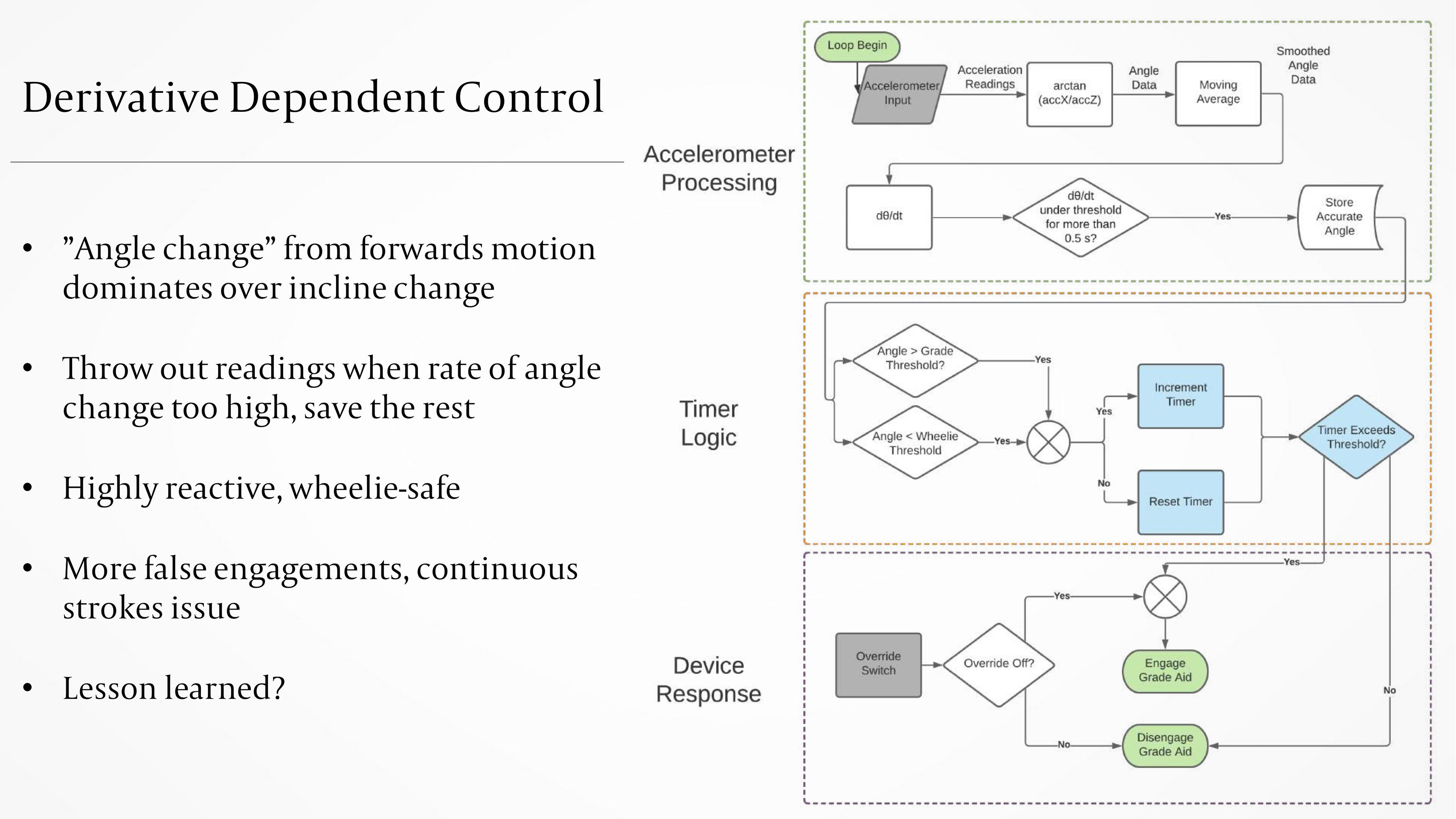
Software logic which I implemented.
Demonstration of logic in early prototyping stage.
Public design show video.